Projects
Here is a collection of some of my extracurricular projects, organized into work, mechatronics, embedded, development, and misc projects. I am always looking to integrate new technologies and concepts into my projects! Please contact me
if you would like a copy of a more detailed portfolio. Feel free to reach out if any of these projects interest you and I'd be happy to have a conversation!
(Detailed portfolio available upon request.)
Work Projects
Projects done at different companies.
Phoenix Robotic Hands
At Sanctuary AI I designed various embedded systems components for the sensors within the robotic hand. I also designed and built several testbenches for hardware/firmware validation and verification. Video Demo

MIDAS
As part of my time at Pegasus Imagery, I connected the in-house Moisture & Icing Detection Alert System (MIDAS) to AWS via a custom IoT Android application. I also implemented a machine learning classifier into the mobile application for differentiating different icing types and thicknesses. I also overhauled the UI to be easier to use for flight engineers. Website

Sparrow NG
I designed a few test rigs including mechanical, electrical, and software components to validate a proprietary Parachute Recovery System to meet ASTM standards for the Sparrow New Generation (NG) drone in development. The rigs saw three successful helicopter deployments! I also created an adapter PCB for the internal wiring of the drone.

Robin XL
I designed the mounting and deployment of a new parachute recovery system for the Robin XL drone using Solidworks. I also wrote system requirements and test procedures/documentation for future tests on the system.
Mechatronics
Robotics, electrical, embedded software, and electromechanical vehicles.
Waste Sorting Robot
McBot is a fast-food waste sorting robot that uses computer vision and a custom 5-DOF robotic arm. The project was successfully demonstrated sorting a tray of McDonald's waste at UBC's Design and Innovation Day. I led the development, review, integration, and testing of the robotic system.

SAND-e
SAND-e is an autonomous beach cleaning robot that aims to promote awareness around the issue of beach waste and clean small litter. I did overall and detailed electrical, software, and mechanical system design. I led my team in drafting a proposal and presenting our design, which was awarded $15k by UBC
UAGV
I designed the propulsion and electrical systems for a flying rover that can transform between ground travel and flight to overcome obstacles common to search and rescue scenarios, capable of carrying a modular payload package of up to 300 grams. Design Report

Rhino UGV
Rhino is a first person view (FPV) remote controlled Beyond Visual Line-Of-Sight (BVLOS) ground vehicle built to scan QR codes and retrieve medical packages in remote locations. Rhino was designed in OnShape CAD and features a tracked propulsion system. Video
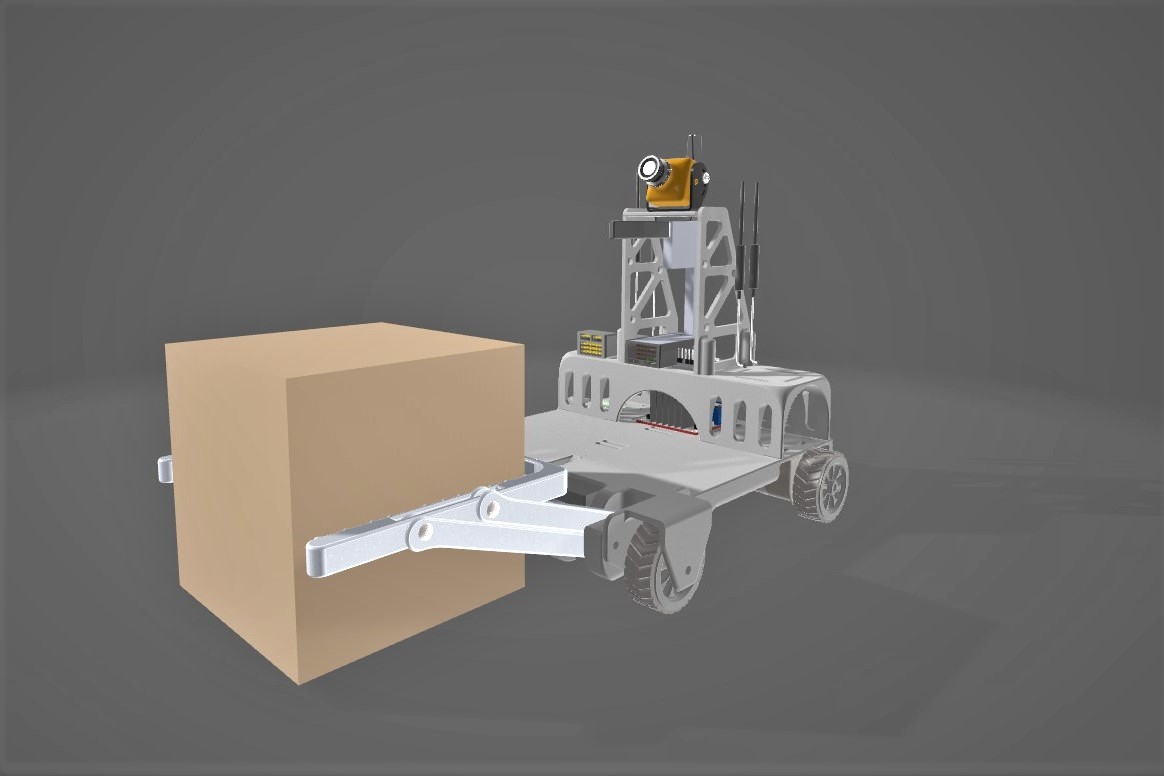
Scorpion UGV
Scorpion is the second generation FPV BVLOS ground vehicle, designed in SolidWorks CAD software. This UGV features a retracting arm system that picks up packages as well as performing all the other functions of Rhino, all controlled remotely. Scorpion was built to compete in the Unmanned Systems Canada 2021 Competition. View in AR

Leap Motion Hand Controlled Robotics
Remote hand-controlled robotics was the focus of this project, using the Leap motion tracker connected via Bluetooth. I wrote programs for hardware (Arduino Mega connected to 5 servos in a hand/arm configuration) involving TX/RX, wrote Java code for data acquisition from the meshed IR camera module, and designed the schematic.

Autonomous Model Train
A line-following robot train using IR sensors that plays "We Wish You A Merry Christmas" as it moves along the track. It is all driven from an Arduino Uno connected to IR sensors, an SD card reader breakout board, and a small speaker. Documentation
Electronics/Embedded
Embedded & electronics projects.
Custom PCB Macropad
A wired custom macropad for executing autohotkey scripts and frequently used shortcuts. I designed the PCB in EasyEDA and programmed it using Arduino C.

Drone Light PCB
A custom drone lighting solution made to meet regulations for night drone flying. Full project files and documentation can be found on Github.

Smart Battery Conversion PCB
Creating a BMS PCB to convert LiPo battery packs into monitored and protected parts of a system. Battery status is sent to a low-power E-Ink display and a drone flight computer.
Development
Coding projects: AR, websites, etc.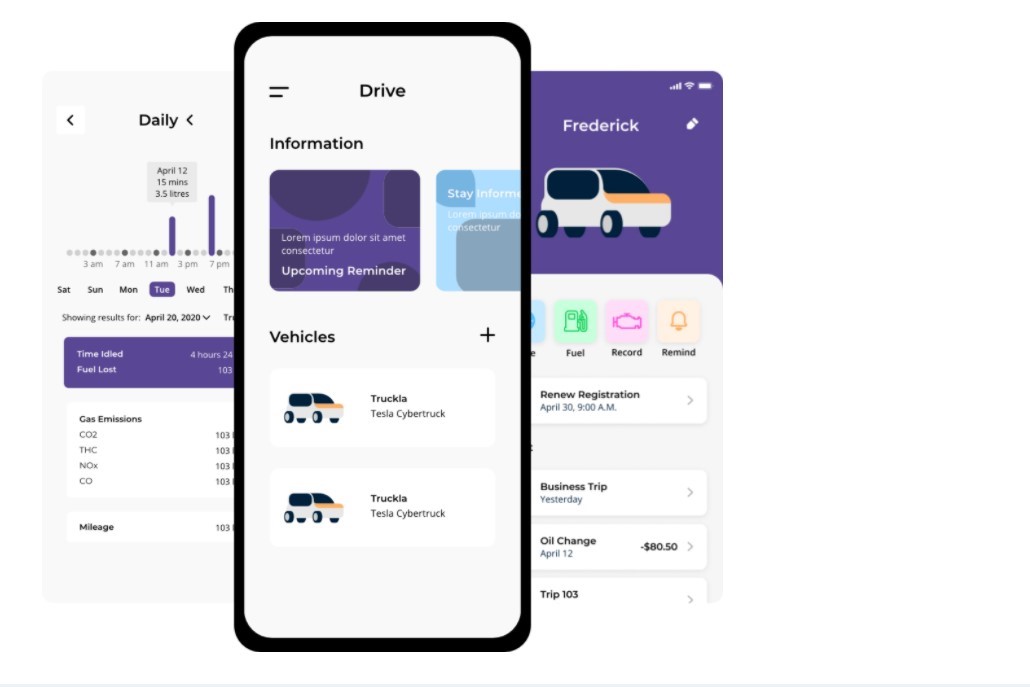
Autobud Mobile Application
A flutter application that uses phone GPS data with car information to provide vehicle idle impact results. Information is stored and served from a Firebase Cloud Firestore Database and features OAuth2 authentication. This application has placed as an international semifinalist in the global Technovation Challenge. Website
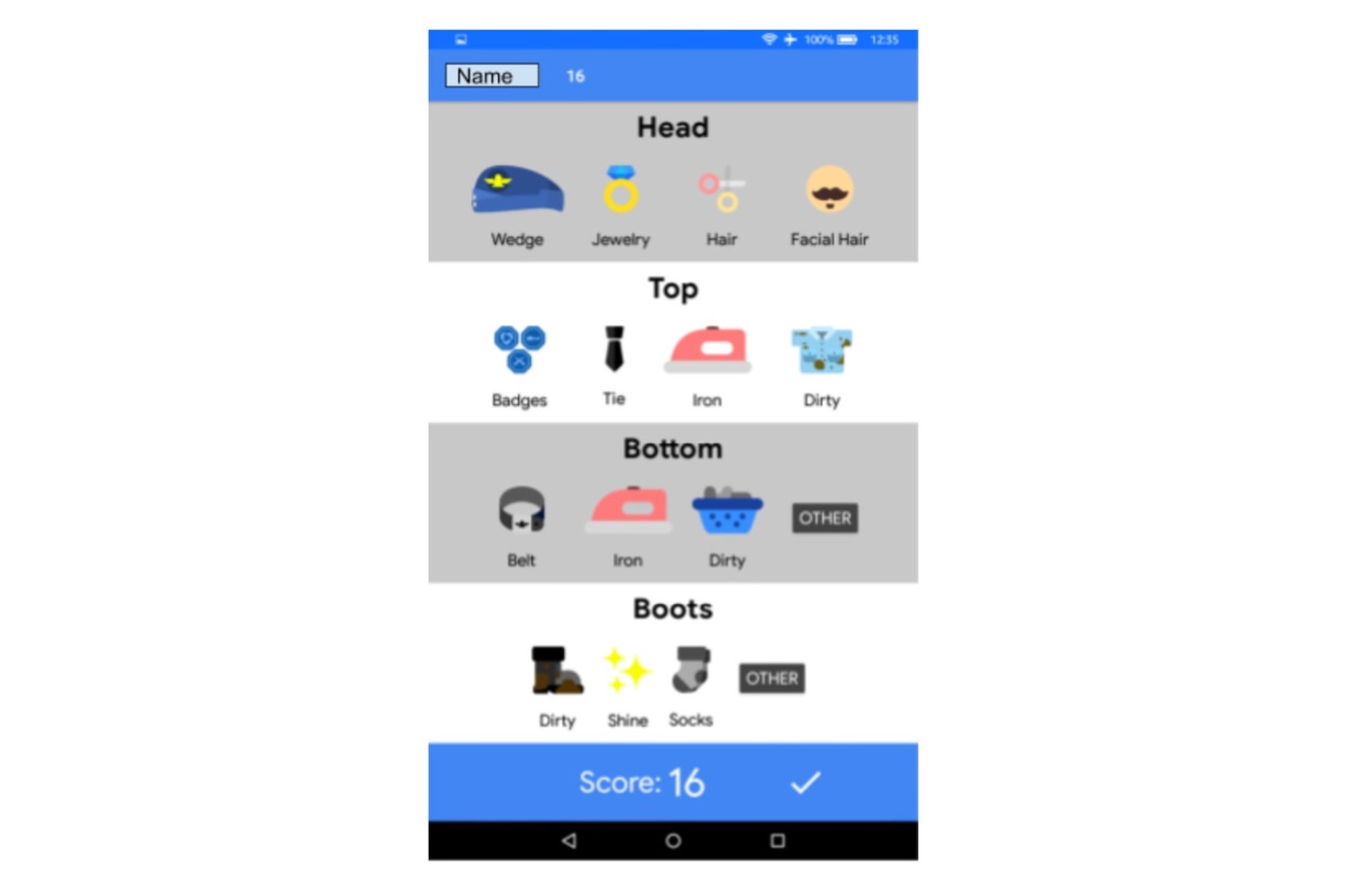
Uniform Marking Android Application
A Java Android application developed with Firebase Realtime Database (JSON object database), featuring ordered data queries, exception handling, object-oriented programming, and intents. Developed exclusively for the client 810 Royal Canadian Air Cadet Squadron that replaced a pen-and-paper system which reduced uniform marking speeds by roughly 15% while saving paper.
Project Boom WebAR
A web-based Augmented Reality viewer for The Project Boom, for the sharing and promotion of the supersonic aircraft design. The AR demo is a javascript implementation of WebAR surface recognition and is compatible with iOS 11+, Android 9+, IE11+, and Chrome. AR Demo

UBC UAS AR Model Viewer
This to-scale model viewer for visualization purposes was built off of the same source code as the Project Boom WebAR project I worked on. This visualization tool helped with taking off the CAD goggles and seeing how things scale in real life!

Mike Hofer Music Website
A website developed for the client, Mike Hofer, using HTML, Bootstrap CSS, and Javascript. See at mhmmikehofermusic.ca

Crazy Eights
A Crazy Eights game created with the JavaFX GUI library where the player plays against an NPC. The game is downloaded and ran as a .jar.
Misc. Projects
Other projects I had a lot of fun with!
Studio
A studio the size of a tiny house, featuring a cantilevered design and full electrical. My largest project to date, designed and hand built from the ground up by myself and lots of friends (to building code, of course).

The Project Boom
I used Solidworks CAD and FEA to design the internal wing structures for The Project Boom, a group of engineering students aiming to be the first to break the sound barrier with RC aircraft and break the world record. This design, inspired by large scale supersonic aircraft wing structures, was used in the early 3D Printed Concept Aircraft. Website

UAS eVTOL Beetle
The electric Vertical Takeoff and Landing (eVTOL) drone was developed to compete in the 2022 International AUVSI Student UAS competition. I managed the overall project direction as the team Captain, but also focused on wing design, stability, and control using XFLR5, OpenVSP, and Solidworks CFD. Documentation

Ataksak Rover
Ataksak Rover is a flying and driving drone designed for fragile payload retrieval and precision delivery in the 2022 Aerial Evolution Association of Canada's student competition. I managed the overall project direction as the team Captain in addition to rapid prototyping the driving and retrieval mechanism using laser cutting and 3d printing. I also piloted all of the test flights. Website

P39 Airacobra Restoration
As an Assistant Restoration Technician at the Alberta Aviation Museum, I used air and power tools to fabricate and restore the sheet metal skins and internal structures of two deteriorated full-scale P39 Airacobras from engineering drawings.
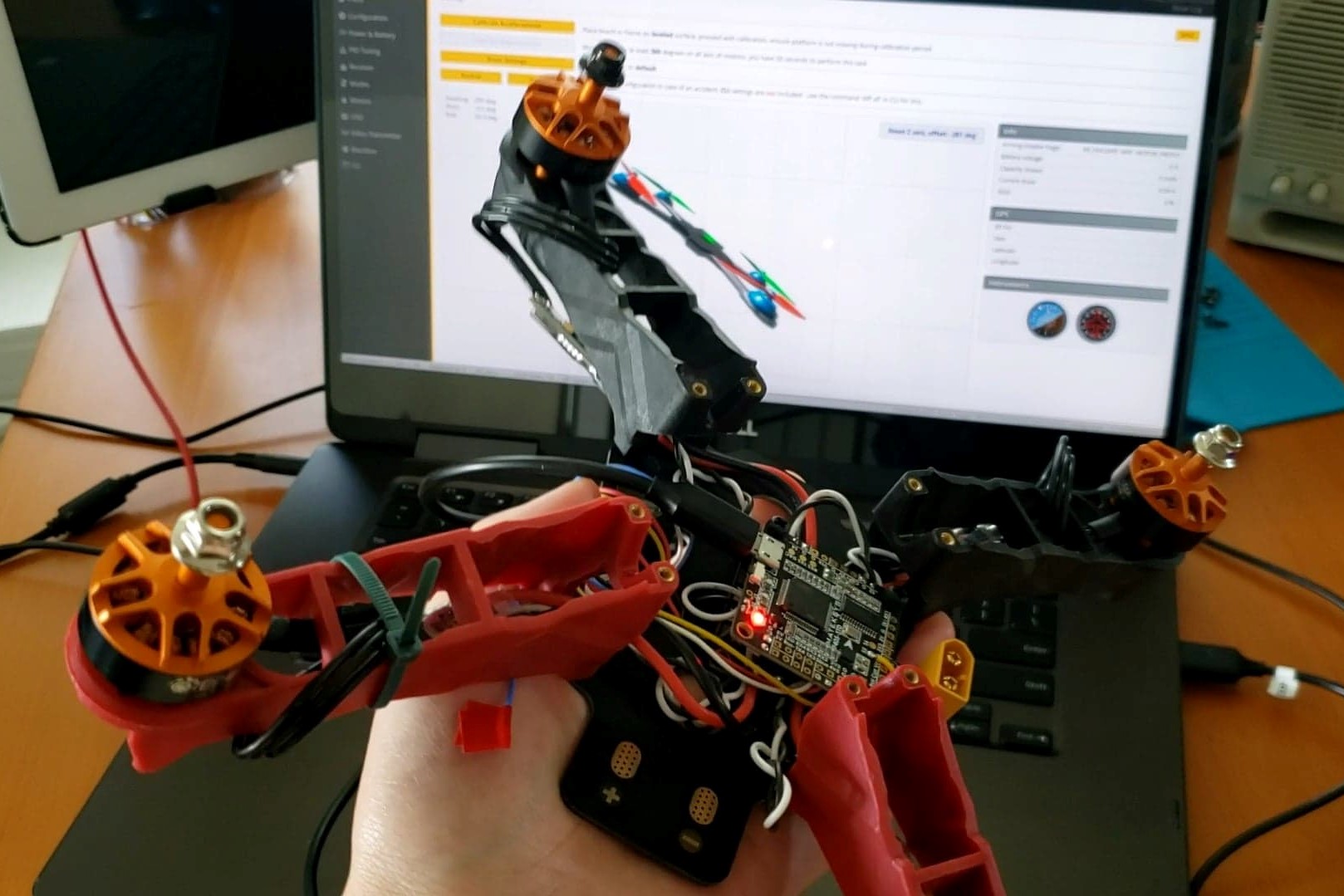
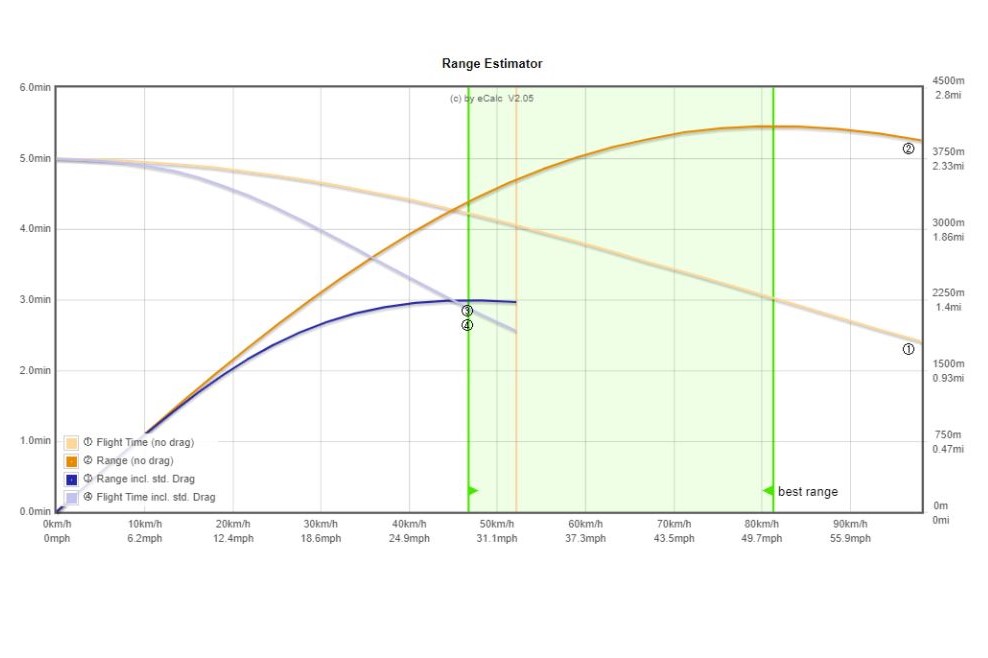
250 Quadcopter
My first DIY drone project powered by a STM32F405 flight controller, 4 brushless DC motors, and a 3S LiPo that I selected and sourced through basic thrust calculations and checking component compatability. This drone was built to be a testbed for future UAV experiments.